


در اینجا با ربات سورتینگ یا همان ربات نظم دهنده و ربات جابجایی خودکار آشنا میشویم و انواع آن را به همراه عکس و مشخصات بررسی میکنیم.

استفاده از ربات
یکی از سناریوهای استفاده از ربات مرتب ساز یا ربات سورتینگ این است که کارهای تکراری و خسته کننده را ربات انجام دهد و اپراتور انسانی به کارها و عملیات پیچیده تر منتقل شود .
ربات های مرتب سازی را می توان در محیط های مختلف از جمله انبارها، کارخانه ها و کارگاه ها مستقر کرد. در مورد مرتبسازی، جایی که زمان و مکان بیشترین اهمیت را دارند، کوباتها میتوانند همکاری قوی بین انسان و ربات برقرار کنند.
ربات های مرتب سازی چیست؟
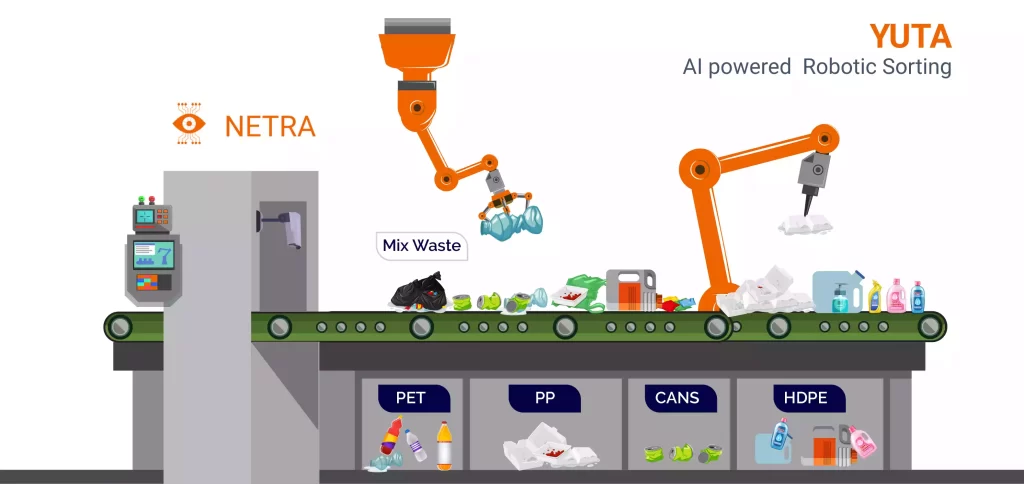
رباتهای مرتبکننده، رباتهای مجهز به هوش مصنوعی هستند که برای کمک به خودکارسازی فرآیندهای صنعتی دستی طراحی شدهاند. بازوهای ربات می توانند بسته ها، پاکت ها و سایر محصولات را انتخاب کنند تا آنها را مرتب کرده و روی خط نقاله قرار دهند. همچنین انواع مختلفی از کوبات ها وجود دارد که می توان از آنها برای دسته بندی و بازیافت زباله استفاده کرد. تمام بازوهای ربات مجهز به سیستم بینایی هستند تا فرآیند را دقیق تر و بدون خطا انجام دهند.
مرتبسازی دستی برای انجام وظایف مختلف به اپراتورهای انسانی متکی است، مانند ابتدا شناسایی موارد و سپس مرتبسازی آنها، در حالی که، در همان زمان، مرتبسازی خودکار به فناوریها و الگوریتمهای متنوع برای اجرای همکاریهای پیشرفته انسان و ربات متکی است.
گزارش McKinsey بیان میکند که امروزه بیشتر کسبوکارها بهکارگیری فناوریهای مدیریت هوشمند انسان (52%) و اتوماسیون فرآیند روباتیک (45%) را بیشتر ترجیح میدهند. سازمانها روی ابزارهای متعدد فرآیند کسبوکار و اتوماسیون روباتیک سرمایهگذاری میکنند. با شیوع کووید-19 و تأثیر بسیار زیاد آن بر صنایع مختلف، کسب و کارها در حال ایجاد انعطاف پذیری خود در برابر موانع هستند. و مرتب سازی ربات ها یکی از راه های بهبود و افزایش کارایی عملیات تولید است.
بهره وری بیشتر
ربات های مرتب سازی کیفیت بالا و بهره وری را بهبود می بخشند زیرا می توانند خطاها را در مقایسه با اپراتورهای انسانی کاهش دهند. خطاهای کمتر و ظرفیت مرتب سازی بهتر بر حجم اقلام تأثیر می گذارد و منجر به افزایش سطح بهره وری می شود.
زمان اجرای کوتاه
نصب یک بازوی ربات برای انجام مرتب سازی تنها 10 دقیقه طول می کشد، در حالی که، در مرتب سازی دستی ، نوشیدن قهوه، دیر رسیدن و مسائل شخصی عواملی هستند که زمان اجرای اپراتور انسانی را کاهش می دهند. با این حال، یک بازوی ربات به اندازه کافی زمان توقف برای مرتب سازی را کاهش می دهد.
رباتهای مرتبسازی DOBOT برای اجرای تولید با کارایی بالا
ربات های مرتب سازی DOBOT را می توان برای مرتب سازی سیم کارت ها استفاده کرد. این یک همکاری پیشرفته از دو بازوی ربات، CR5 و MG400 است که به طور متعادل برای ایجاد یک سیستم تولید کارآمد کار می کنند.
بازوهای ربات CR5 و MG400 برای مرتب سازی سیم کارت ها از نزدیک کار می کنند. هر دوی آنها درگیر عملیات انتخاب و مکان هستند. در حالی که cobot CR5 یک کارت را از جعبه ذخیره کارت برمیدارد و آن را روی خط نقاله قرار میدهد، MG400 آن را از یک خط نقاله برمیدارد و روی شیار سیمکارت قرار میدهد.
فرایند مرتب سازی
فرآیند مرتب سازی برای تولید ضروری است. این امر شامل مرتب کردن اقلام به طور سیستماتیک با ترتیب یا طبقه بندی با شناسایی شباهت های بین اقلام است. مرتب سازی زمانی یک فرآیند کاملاً دستی بود زیرا برای اتوماسیون بسیار پیچیده تلقی می شد. با این حال، پیشرفت فناوری رباتیک منجر به تبدیل شدن ربات های صنعتی بر فرآیندهای سنتی انسانی از جمله مرتب سازی شده است. مرتب سازی توسط روبات هایی مانند ABB IRB 140 در خطوط تولید متعدد به صورت خودکار انجام می شود. صنایع غذایی، دارویی، ضایعات، انبارداری و لجستیک تنها برخی از صنایعی هستند که از ربات های مرتب سازی استفاده کرده اند.
برای خودکارسازی برنامههای مرتبسازی، رباتهای صنعتی با ترکیبی از هوش مصنوعی و بینایی روباتیک ادغام میشوند تا بتوانند موارد را مکانیابی، شناسایی و انتخاب کنند. رباتهای صنعتی که برای مرتبسازی استفاده میشوند، معمولاً به یک گیره رباتیک مجهز میشوند تا بتوانند اقلام را جمعآوری کرده و در طول مرتبسازی در گروهها قرار دهند.
مزایایی استفاده از ربات مرتب کننده:
استقرار ربات های مرتب کننده مزایای قابل توجهی برای تولیدکنندگان دارد. ربات های مرتب سازی قابل اعتمادتر و دقیق تر از انسان هستند. موارد به دلیل از دست دادن تمرکز یا خطای انسانی از دست نمی روند. همه موارد به طور کامل و درست با هر چرخه مرتب شده اند. ماهیت تکراری مرتبسازی میتواند بر کارگران تأثیر بگذارد، اما روباتها در تکرار برتری دارند. نرخ توان بالاتر آنها به این معنی است که آنها می توانند با حجم های بالا همراه باشند و حتی بهره وری را افزایش دهند. این یکی از مزیت های اصلی اتوماسیون با روبات ها است.
در صنعت زباله، رباتهای مرتبکننده به دلیل خط کار کسلکننده، کثیف و خطرناک و بدلیل استقبال بسیار کم کارگر برای کار کردن در چنین شرایطی بسیار مورد استقبال قرار گرفت. ربات های صنعتی برای شناسایی و دسته بندی اقلام قابل بازیافت از زباله ها با استفاده از هوش مصنوعی و بینایی استفاده می شوند. هوش مصنوعی به رباتها اجازه میدهد تا ترکیب شیمیایی زبالهها را شناسایی کرده و با تشخیص شکل، زبالهها را برای اقلام قابل بازیافت مانند شیشه و پلاستیک مرتب کنند. FANUC LR Mate 200iD یکی از نمونههای روباتی است که توسط شرکتهای زباله برای خودکارسازی دستهبندی مواد بازیافتی به کار گرفته شدهاست. LR Mate 200iD با یک گیره طراحی شده برای کنترل شرایط سخت تفکیک زباله یکپارچه شدهاست. اقلام قابل بازیافت سریع، دقیق و ایمن مرتب می شوند.

برخی از انواع ربات های مرتب کننده و جابجا کننده




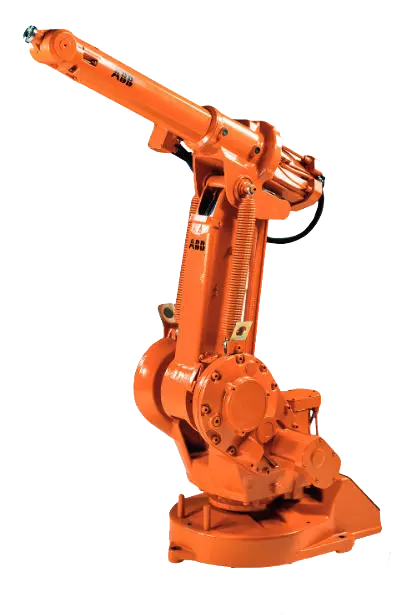
1- ABB IRB 1410
ربات صنعتی و جمع و جور ABB IRB 1410 یک مدل با تحمل بار کم (5 کیلوگرم) است که هم قیمت مناسب و هم قابلیت اطمینان بالایی دارد. این ربات ABB در جوشکاری قوس الکتریکی، جابجایی مواد و … استفاده میشود. این ربات از کنترلر پیشرفته ABB IRC5 استفاده می کند. این ربات شش محوره ABB می تواند تا 3 محور اضافی را کنترل کند که انعطاف پذیری در یکپارچگی را فراهم می کند. این ربات از نظر محموله شبیه به FANUC Arcmate 100ic، Yaskawa Motoman MH6 و KUKA KR 6-2 است. کاربردهای دیگری که این ربات ABB IRB می تواند در آنها انجام دهد عبارتند از: انتخاب و تشخیص مکان، جوش لیزری و جوش پلاسما.
- تحمل وزن : 5 کیلوگرم (11.05 پوند)
- برد: 1440 میلیمتر (56.69 اینچ)
- تکرارپذیری: ± 0.02 میلی متر (.0007 اینچ)
- وزن ربات: 225 کیلوگرم (496.04 پوند)
- ساختار: مفصلی
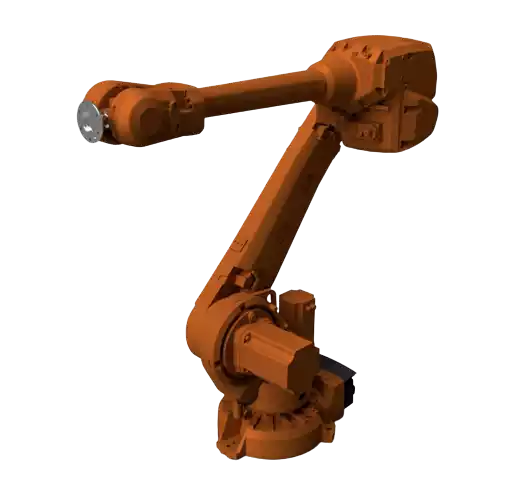
2- ABB IRB 1600
ربات صنعتی و پرسرعت ABB IRB 1600 مدلی با تحمل بار کم (6 – 10 کیلوگرم) است که در کاربردهای جوشکاری قوس الکتریکی، توزیع و مونتاژ استفاده میشود. این ربات را می توان برای کارایی بهتر روی زمین، پایه، دیوار نصب کرد. این ربات وظیفه جابجایی مواد یا بسته را در فاصله بین 1.2 تا 1.45 متر بر عهده دارد. IRB 1600 از کنترلر ابتکاری ABB IRC5 استفاده می کند. این ربات از نظر محموله شبیه به FANUC M10ia، Yaskawa Motoman MH6 و KUKA KR 6-2 است. کاربردهای دیگری که این ربات ABB IRB می تواند در آنها انجام دهد عبارتند از: انتخاب و تشخیص مکان، جوش لیزری و جوش پلاسما.
- تحمل بار: 6-10 کیلوگرم (13.22-22.04 پوند)
- برد: 1.2-1.45متر 47.24-57.08) اینچ(
- تکرارپذیری: ± 0.02-.05 میلی متر (.0007-.001 اینچ)
- وزن ربات: 250 کیلوگرم (551.15 پوند)
- ساختار: مفصلی
3- ABB IRB 2400/16
ABB IRB 2400-16 یک ربات صنعتی رایج است که قادر به انجام انواع کاربردهای رباتیک است. این ربات ABB در جوشکاری قوس ، جابجایی خودکار مواد و برنامه های کاربردی مراقبت از ماشین استفاده میشود. این ربات صنعتی مورد استفاده را می توان روی زمین، دیوار، قفسه یا پایه نصب کرد. بسته به زمان تولید، این ربات جابجایی مواد یا کالایی با وزن 16 تا 20 کیلوگرمی را بر عهده دارد.
این ربات مورد استفاده ABB می تواند تا 3 محور اضافی را کنترل کند که اتوماسیون انعطاف پذیری را ارائه می دهد. این ربات ABB از نظر ظرفیت محموله مشابه FANUC M16ib، Yaskawa Motoman HP20D و KUKA KR 16-2 است. برنامه های کاربردی دیگری که این ربات ABB IRB می تواند انجام دهد عبارتند از: انتخاب و مکان رباتیک، برش خودکار، و رباتیک زدایی.
- تحمل بار: 16-20 کیلوگرم (35.27-44.09 پوند)
- برد : 1.5-1.55متر (59.05-61.02 اینچ)
- تکرارپذیری: ± 0.06 میلی متر (.0023 اینچ)
- وزن ربات: 380 کیلوگرم (837.75 پوند)
- ساختار: مفصلی

4- ABB IRB 2600/20
ABB IRB 2600-20 یک ربات پرسرعت است که در جوشکاری قوس الکتریکی، جابجایی مواد و ماشین آلات استفاده می شود. این ربات صنعتی مورد استفاده را می توان روی زمین، دیوار، قفسه یا پایه نصب کرد. این ربات شش محوره می تواند تا 3 محور اضافی را کنترل کند. این ربات ABB از نظر محموله شبیه به FANUC M20ia، Yaskawa Motoman MH20 و KUKA KR 16-2 است. کاربردهای دیگری که این ربات ABB مورد استفاده می تواند انجام دهد شامل برش پلاسما، جوش لیزری و جوش پلاسما است.
- تحمل بار: 20 کیلوگرم (44.09 پوند)
- برد: 1650 میلیمتر (64.96 اینچ)
- تکرارپذیری: ± 0.04 میلی متر (.0015 اینچ)
- وزن ربات: 272 کیلوگرم (599.65 پوند)
- ساختار: مفصلی

5- ABB IRB 4400-45/1.95
ABB IRB 4400-45/1.95 یک ربات با بار متوسط است که می تواند جابجایی خودکار مواد و برنامه های مسیریابی رباتیک را انجام دهد. این ربات دارای برد 1950 میلی متر و ظرفیت بار 45 کیلوگرم است. IRB 4400 45 از کنترلر پیشرفته ABB IRC5 M2004 استفاده می کند. این ربات مفصلی ABB از نظر محموله شبیه به FANUC M710ic/50، Yaskawa Motoman MH50 و KUKA KR 60-3 است. برنامه های رباتیکی که به محموله و دسترسی کمتری نیاز دارند می توانند از ABB IRB 2400-16 استفاده کنند. برنامه های کاربردی بزرگتر به یک ABB 6640-185 یا مشابه آن نیاز دارند. برنامه های کاربردی دیگری که از این ربات استفاده شده عبارتند از مونتاژ رباتیک، انتخاب و مکان خودکار، و توزیع رباتیک.
- تحمل بار: 45 کیلوگرم (99.20 پوند)
- برد : 1950 میلیمتر (76.77 اینچ)
- تکرارپذیری: ± 0.07 میلی متر (.0027 اینچ)
- وزن ربات: 1040 کیلوگرم (2292.8 پوند)
- ساختار: مفصلی

6- ABB IRB 4600-45/2.05
یک ربات با بار متوسط است که در تعمیر و نگهداری ماشین آلات، سوراخزدایی، و برنامههای برداشت و تشخیص مکان استفاده میشوداین ربات دارای برد 2050 میلیمتر و بار 45 کیلوگرمی است. IRB 4600 45 از کنترلر ABB IRC5 M2004 استفاده می کند. این ربات ABB از نظر محموله شبیه به FANUC M710ic/50، Yaskawa Motoman MH50 و KUKA KR 60-3 است. کاربردهای دیگری که این ربات می تواند انجام دهد شامل مونتاژ، حذف مواد و توزیع است.
- تحمل بار: 45 کیلوگرم (99.20 پوند)
- برد: 2050 میلیمتر (80.70 اینچ)
- تکرارپذیری: ± 0.05 میلی متر (.0019 اینچ)
- وزن ربات: 425 کیلوگرم (936.97 پوند)
- ساختار: مفصلی
7- FANUC LR Mate 200ic
یک ربات صنعتی با بار کوچکتر و با سرعت بالا است که برای انجام جابجایی مواد، جوشکاری خودکار و برنامه های انتخاب و مکان رباتیک استفاده می شود. این LR Mate از کنترلر R 30ia mate استفاده می کند. ربات 200ic دارای برد 704 میلی متری و ظرفیت تحمل بار 5 کیلوگرمی است. این ربات مورد استفاده از نظر محموله مشابه موتومان MH5، ABB IRB 140 و KUKA KR5 R650 است.
- تحمل بار: 5 کیلوگرم (11 پوند)
- برد: 704 میلیمتر (27.72 اینچ)
- تکرارپذیری: ± 0.02 میلی متر (.0008 اینچ)
- وزن ربات: 27 کیلوگرم (59.52 پوند)
- ساختار: مفصلی

FANUC LR Mate 200ID -8
FANUC LR Mate 200id یک ربات صنعتی کوچک با ظرفیت حمل بار 7 کیلوگرم است. ربات FANUC LR Mate 200id برای کاربردهای کوچکتر جابجایی مواد رباتیک طراحی شده است. اندازه LR Mate 200id این ربات را برای برنامه های کوچک روی میز مناسب است. این ربات FANUC انتخاب مناسبی برای سلول های آموزشی رباتیک است. نسخه توسعه یافته این ربات در FANUC LR Mate 200id/7L موجود است. شماره قطعه برای نسخه استاندارد این ربات شش محوره A05B-1142-B201 است. شماره قطعه کنترل کننده این ربات مفصلی A05B-2651-B021 است. این ربات نظر حمل بار مشابه موتومان MH5، ABB IRB 140 و KUKA KR6 R900 است. این مینی روبات FANUC معمولاً با یک گیره پنوماتیک کوچک ادغام می شود.
- بار: 7 کیلوگرم (15.43 پوند)
- دسترسی: 717 میلیمتر (28.22 اینچ)
- تکرارپذیری: ± 0.03 میلی متر (.0008 اینچ)
- وزن ربات: 25 کیلوگرم (55.11 پوند)
- ساختار: مفصلی

M-1ia -9
FANUC M-1iA یک متخصص قطعات کوچک و بخشی از سری ربات های دلتا FANUC است. m1ia با بدنهای عنکبوتمانند بسیار فشرده و ایدهآل برای برنامههایی است که نیاز به حمل و جابجایی بار 1 کیلوگرمی یا کمتر دارند. دارای برد 420 میلی متر و 6 محور است. m-1ia برای کاربرانی که به سرعت حمل و نقل سریع و تطبیق پذیری نیاز دارند ایده آل است، به همین دلیل است که اغلب توسط سازندگان الکترونیک، مکانیک خوب، مواد غذایی، پزشکی و داروسازی استفاده می شود.
طراحی جمع و جور ربات M-1ia Delta آن را به صرفه جویی در فضای مناسب برای کسانی که فضای محدودی در طبقات تولیدی خود دارند تبدیل می کند و امکان نصب در قفسه را فراهم می کند. حتی می توان آن را از پایه خود جدا کرد و مستقیماً در ماشین آلات ادغام کرد، مهم نیست که چقدر کوچک باشند. این امکان دسترسی بیشتر به قطعه کار را فراهم می کند. تطبیق پذیری آن همراه با سرعت آن، چرخه های سریع را برای سازندگان ممکن می سازد.
M1i-A با کنترلرهای هوشمند R-30iA و R-30iA Mate FANUC سازگار است. گزینه های اضافی موجود با m-1iA شامل iRVision، ردیابی خط و ردیابی خط بصری است. این گزینه ها به M 1iA اجازه می دهد تا اشیاء نامنظم قرار داده شده را به راحتی مکان یابی کند و آنها مرتب کنند.
- ظرفیت بار: 1 کیلوگرم (2.20 پوند)
- برد: 420 میلیمتر (16.53 اینچ)
- تکرارپذیری: ± 0.02 میلی متر (.0007 اینچ)
- وزن ربات: 20 کیلوگرم (44.09 پوند)
- ساختار: مفصلی

FANUC M-10ia-10
ربات FANUC M-10ia برای کاربردهای مختلف جابجایی مواد سبک طراحی شدهاست. این ربات با سرعت بالا در بسیاری از سناریوها از جمله مونتاژ، مراقبت از ماشین و قالب گیری تزریقی استفاده میشود. M 10ia یک ربات شش محوره با موتورهای سروو است. FANUC M10ia در کنترلرهای FANUC R-30ia و FANUC R-30ib موجود است. این ربات جابجایی مواد می تواند وارونه نصب شود، روی زمین نصب شود یا روی یک مسیر نصب شود تا انعطاف پذیری کامل به آن بدهد.
- ظرفیت بار: 10 کیلوگرم (22 پوند)
- برد: 1420 میلیمتر (55.90 اینچ)
- تکرارپذیری: ± 0.08 میلی متر (.0031 اینچ)
- وزن ربات: 130 کیلوگرم (286 پوند)
- ساختار: مفصلی

11- FANUC M-016ib
این ربات برای کاربردهای حمل خودکار مواد و مونتاژ رباتیک طراحی شدهاست. این ربات به اندازه FANUC M-6iB RJ3IB قابل اعتماد است، با این حال برد یا بازوی طولانی تر و تحمل بار بیشتری دارد. این ربات انعطاف پذیری قابل توجهی را در کاربردها ارائه می دهد زیرا ساختار مشابه FANUC Arc Mate 120ib دارد و یک ربات شش محوره با موتورهای سروو است.
مشخصات فنی
- محموله: 20 کیلوگرم (44 پوند)
- دسترسی: 1667 میلیمتر (65.63 اینچ)
- تکرارپذیری: ± 0.08 میلی متر (.0031 اینچ)
- وزن ربات: 220 کیلوگرم (485 پوند)
- ساختار: مفصلی

12- FANUC M-2ia
FANUC M-2iA یک ربات منحصر به فرد به سبک دلتا است که دارای ساختار 6 محوره است. M-2iA برای جابجایی قطعات 6 کیلوگرمی یا کمتر برای برداشت، مونتاژ و بسته بندی طراحی شده است. بعلاوه، برد بازوی آن تا 1130 میلیمتر این امکان را فراهم میکند محموله یا پاکت های پخش و پلا را منظم و دسته بندی کند. برای صرفه جویی در فضای بیشتر در امتداد خطوط تولید می توان آن را بالای سر نوار نقاله نصب کرد.
- بار: 3 کیلوگرم (6.61 پوند)
- برد: 1130 میلیمتر (44.48 اینچ)
- تکرارپذیری: ± 0.10 میلی متر (.0039 اینچ)
- وزن ربات: 140 کیلوگرم (308.64 پوند)
- ساختار: مفصلی

13- FANUC M-20ia
ربات صنعتی FANUC M-20ia برای مونتاژ رباتیک، بسته بندی خودکار و کاربردهای جابجایی مواد طراحی شدهاست. این ربات همچنین در بسیاری از سناریوهای جوشکاری قوس خودکار استفاده می شود، زیرا از نظر مکانیکی مشابه FANUC Arcmate 120ic M-20IA یک ربات شش محوره با موتورهای سروو است. ربات FANUC M20ia به همراه کنترلرهای FANUC R-30ia و FANUC R-30ib تولید شدهاست.
- ظرفیت تحمل بار : 20 کیلوگرم (44 پوند)
- طول بازو : 1811 میلیمتر (71.31 اینچ)
- تکرارپذیری : ± 0.08 میلی متر (.0031 اینچ)
- وزن ربات : 250 کیلوگرم (551 پوند)
- ساختار: مفصلی

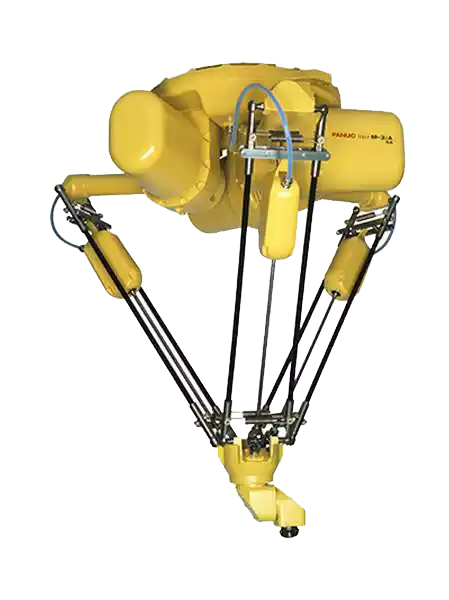
14- FANUC M-3ia
رباتهای پرسرعت FANUC M-3ia به سبک دلتا دارای ساختار 3، 4 یا 6 محوره بسته به مدل هستند. M-3iA برای حمل قطعات بین 6 تا 12 کیلوگرم در برنامه های چیدن، مونتاژ و بسته بندی طراحی شدهاست. این رباتهای دلتای مورد استفاده را میتوان با کنترلکنندههای R-30ia، R-30ib و R-30ib+ جفت کرد، بسته به زمان تولید آنها. برای صرفه جویی در فضای بیشتر در امتداد خطوط تولید می توان آن را بالای سر خط تولید نصب کرد.
- بار: 6 کیلوگرم (13.22 پوند)
- برد: 1350 میلیمتر (53.14 اینچ)
- تکرارپذیری: ± 0.10 میلی متر (.0039 اینچ)
- وزن ربات: 175 کیلوگرم (385.80 پوند)
- ساختار: مفصلی
15- FANUC M-6ib
ربات FANUC M-6ib برای کاربردهای جابجایی مواد با بار وزن کم طراحی شدهاست. FANUC M-6ib RJ3IB به اندازه FANUC M-16iB RJ3IB قابل اعتماد است، اما دسترسی کوتاه تری دارد. M6iB انعطاف پذیری قابل توجهی در کاربردهای روباتیک ارائه می دهد و ساختار و ساختار مشابه FANUC Arc Mate 100ib دارد و آن را به گزینه ای مناسب برای اتوماسیون جوش تبدیل می کند. M6ib یک ربات صنعتی شش محوره با موتورهای سروو است. این ربات مفصلی سلف M10ia پیشرفته است. FANUC M6ib در کنترلرهای FANUC R-J3IB، FANUC R-J3IC و FANUC R30ia موجود است.
- بار: 6 کیلوگرم (13 پوند)
- دسترسی: 1373 میلیمتر (54 اینچ)
- تکرارپذیری: ± 0.08 میلی متر (.0031 اینچ)
- وزن ربات: 135 کیلوگرم (297 پوند)
- ساختار: مفصلی
16- FANUC M-710ic/50
برای مونتاژ خودکار، بسته بندی رباتیک و کاربردهای جابجایی مواد طراحی شدهاست. M 710ic/50 یک ربات شش محوره با موتورهای سروو است. FANUC M710ic/50 در کنترلرهای FANUC RJ3IC، FANUC R-30IA و FANUC R-30ib موجود است. M710ic 50 یکی از همه کاره ترین ربات های موجود FANUC است که قادر به ریخته گری و برش خودکار با جت آب است. M710ic-50 با محموله 50 کیلوگرمی میتواند با یک ابزار بازوی سنگین ادغام شود و انعطافپذیری بیشتری در جابجایی مواد و برنامههای بارگیری خودکار ماشین داشته باشد.
- بار: 50 کیلوگرم (110.23 پوند)
- دسترسی: 2050 میلیمتر (80.71 اینچ)
- تکرارپذیری: ± 0.07 میلی متر (.0028 اینچ)
- وزن ربات: 560 کیلوگرم (1234 پوند)
- ساختار: مفصلی

17- FANUC R-2000ib/165F
ربات FANUC R-2000ib/165F یک ربات بارگیری سنگین و قابل نصب روی زمین است. این ربات در بسیاری از کاربردهای جوش نقطه ای و جابجایی مواد استفاده می شود. مانند بسیاری از روبات های FANUC، r2000ib قابل اعتماد و کارآمد است و آن را انتخابی عالی می کند. 165F می تواند با کنترلر FANUC RJ3IC یا FANUC R30ia عرضه شود. علاوه بر کاربردهای ذکر شده در بالا، R2000ib 165F را می توان برای مراقبت از ماشین، قالب گیری تزریقی، برش و انتقال قطعات نیز استفاده کرد. ادغام یک FANUC R2000iB استفاده شده در برنامه حمل و نقل مواد می تواند هزینه های تولید شما را به میزان قابل توجهی کاهش دهد.
- بار: 165 کیلوگرم (363.76 پوند)
- برد: 2655 میلیمتر (104 اینچ)
- تکرارپذیری: ± 0.2 میلی متر (.0079 اینچ)
- وزن ربات: 1170 کیلوگرم (2579 پوند)
- ساختار: مفصلی

18- FANUC R-2000ic/165F
ربات FANUC R-2000ic/165F تعادل کاملی از دستیابی طولانی بار زیاد و زمانهای چرخه سریع است که آن را به انتخابی انعطافپذیر برای کاربردهای جابجایی مواد تبدیل میکند. این ربات FANUC هم بار و هم قابلیت دسترسی نسل های قبلی خود یعنی FANUC R-2000ia/165F و FANUC R-2000ib/165F را حفظ می کند.
- محموله: 165 کیلوگرم (363 پوند)
- دسترسی: 2655 میلیمتر (104.52 اینچ)
- تکرارپذیری: ± 0.05 میلی متر (.001 اینچ)
- وزن ربات: 1090 کیلوگرم (2403 پوند)
- ساختار: مفصلی

KUKA KR 5 sixx R65 -19
KUKA KR5 sixx R650 یک ربات صنعتی جمع و جور است که برای کاربردهای حمل و نقل مواد کم بار استفاده می شود. KUKA KR5 R650 از کنترلر KUKA KR C2 ED05 استفاده می کند. این دارای یک بدنه کاری کوچک است که به آن اجازه می دهد در مکان های تنگ کار کند. این ربات کوچک KUKA از نظر دسترسی و بار مشابه FANUC LR Mate 200ic، Yaskawa Motoman MH5 و ABB IRB 140 است. این ربات برای استفاده از آویز آموزشی KUKA KRP2 طراحی شده است. KR5 R650 همچنین می تواند در مونتاژ، چیدن و مکان و کاربردهای آزمایشگاهی استفاده شود.
- بار: 5 کیلوگرم (11.02 پوند)
- برد: 653 میلیمتر (25.70 اینچ)
- تکرارپذیری: ± 0.02 میلی متر (.0007 اینچ)
- وزن ربات: 28 کیلوگرم (61.71 پوند)
- ساختار: مفصلی

KUKA KR6 -20
KUKA KR6 یک ربات صنعتی کم بار است که برای جوشکاری قوس الکتریکی و کاربردهای جابجایی مواد استفاده می شود. KUKA KR6 از کنترلر KUKA KR C2 Ed05 استفاده می کند. این ربات KUKA مورد استفاده را می توان روی زمین نصب کرد یا به صورت وارونه از سقف آویزان کرد. این ربات کوچک KUKA از نظر دسترسی و بار مشابه FANUC M-10ia، Yaskawa Motoman MH6 و ABB IRB 1410 است. این ربات برای استفاده از آویز آموزشی KUKA KRP2 طراحی شده است. KR-6 همچنین می تواند در مونتاژ، انتخاب و مکان و کاربردهای آزمایشگاهی استفاده شود.
- بار: 6 کیلوگرم (13.22 پوند)
- دسترسی: 1611 میلیمتر (63.42 اینچ)
- تکرارپذیری: ± 0.1 میلی متر (.0039 اینچ)
- وزن ربات: 235 کیلوگرم (518 پوند)
- ساختار: مفصلی

KUKA KR6 R900 sixx -21
KUKA KR6 R900 sixx یک ربات صنعتی پیشرفته است که برای کاربردهای حمل و نقل مواد با وزن کم استفاده می شود. KR6 R-این ربات می تواند از هر دو نسخه کوچک و بزرگ کنترلر KRC4 استفاده کند. این ربات دارای رتبه حفاظتی IP54 است. این ربات کوچک از نظر دسترسی و بار مشابه FANUC LR Mate 200ic/5L، Yaskawa Motoman MH5 و ABB IRB 140 است.
- بار: 6 کیلوگرم (13.22 پوند)
- دسترسی: 901.5 میلیمتر (35.49 اینچ)
- تکرارپذیری: ± 0.03 میلی متر (.0011 اینچ)
- وزن ربات: 52 کیلوگرم (114.64 پوند)
- ساختار: مفصلی
KUKA KR10 R1100 -22
KUKA KR10 R1100 یک ربات صنعتی پیشرفته است که برای کاربردهای حمل و نقل مواد با وزن کم استفاده می شود.این ربات از کنترلر KUKA KR C4 استفاده می کند. این ربات می تواند از هر دو نسخه کوچک و بزرگ کنترلر KRC4 استفاده کند. این ربات صنعتی را می توان روی زمین، دیوار یا سقف نصب کرد. این ربات دارای رتبه حفاظتی IP54 است و در نسخه های ضد آب و اتاق تمیز موجود است. این ربات کوچک از نظر دسترسی و بار مشابه FANUC LR Mate 200ic/5L، Yaskawa Motoman MH5 و ABB IRB 1410 است. این ربات برای استفاده از آویز آموزشی KUKA smartPAD طراحی شده است. KR-10 R1100 همچنین می تواند در مونتاژ، چیدن و مکان یابی و کاربردهای آزمایشگاهی استفاده شود.
- بار: 10 کیلوگرم (13.22 پوند)
- برد: 1100 میلیمتر (43.30 اینچ)
- تکرارپذیری: ± 0.03 میلی متر (.0011 اینچ)
- وزن ربات: 55 کیلوگرم (121.25 پوند)
- ساختار: مفصلی

KUKA KR16 -23
KUKA KR16 یک ربات صنعتی انعطاف پذیر است که برای جوشکاری قوس الکتریکی و کاربردهای جابجایی مواد استفاده می شود. این ربات از کنترلر KUKA KR C2 Ed05 استفاده می کند. این ربات را می توان روی زمین، دیوار یا وازونه از سقف نصب کرد. این ربات از نظر دسترسی و بار مشابه FANUC M-20ia، Yaskawa Motoman HP20 و ABB IRB 2400/16 است.
- بار: 16 کیلوگرم (13.22 پوند)
- برد: 1610 میلیمتر (63.38 اینچ)
- تکرارپذیری: ± 0.1 میلی متر (.0039 اینچ)
- وزن ربات: 235 کیلوگرم (518 پوند)
- ساختار: مفصلی

MOTOMAN HP20 -24
Yaskawa Motoman HP20 یک ربات صنعتی چند منظوره است که می تواند روی زمین، سقف یا مسیر نصب شود و انعطاف پذیری قابل توجهی به آن می دهد. HP20 از کنترلر قدرتمند Motoman NX100 استفاده می کند. HP20 را می توان برای عملیات جابجایی مواد، چیدن و جاگذاری، مراقبت از ماشین، توزیع، بسته بندی کیس، مرتب سازی یا مونتاژ استفاده کرد. بر خلاف Motoman EA1900N که به طور خاص برای جوشکاری قوس الکتریکی طراحی شدهاست، تطبیق پذیری Motoman HP20 ، آن را به یک انتخاب عالی برای شرکتی تبدیل میکند که ممکن است پس از تکمیل برنامه اولیه، ربات را تغییر کاربری دهد. این ربات از نظر بار، سرعت و برد مشابه FANUC M-20ia، ABB 2600 و KUKA KR16 است.
- محموله: 20 کیلوگرم (44 پوند)
- دسترسی: 1717 میلیمتر (67 اینچ)
- تکرارپذیری: ± 0.06 میلی متر (.0024 اینچ)
- وزن ربات: 268 کیلوگرم (590 پوند)
- ساختار: عمودی Joint-Arm

MOTOMAN HP3J -25
Yaskawa Motoman HP3J یک ربات جابجایی مواد بسیار جمع و جور است که می تواند برای کاربردهای مختلف مورد استفاده قرار گیرد. این ربات می تواند در برنامه های مونتاژ و انتخاب و تشخیص مکان نیز استفاده شود. ربات صنعتی Motoman HP-3 دارای یک بدنه کاری محکم است که به آن امکان می دهد در شرایط سخت کار کند. Motoman HP3J یک ربات شش محوره با موتورهای سروو است.. Motoman HP3J از نظر دسترسی و بار مشابه FANUC LR Mate 200ic، ABB IRB 140 و KUKA KRC5 R650 است.
- بار: 3 کیلوگرم (6.61 پوند)
- برد: 532 میلیمتر (20.94 اینچ)
- تکرارپذیری: ± 0.03 میلی متر (.0011 اینچ)
- وزن ربات: 27 کیلوگرم (59.52 پوند)
- ساختار: عمودی Joint-Arm

MOTOMAN HP50 -26
Motoman HP50 یک ربات شش محوره پرسرعت است که برای جابجایی خودکار مواد و برنامه های مراقبت از ماشین رباتیک عالی است. Motoman HP50 NX100 ساختار و طراحی مشابهی با Motoman UP50N NX100 دارد.. این ربات از کنترلر قدرتمند Motoman NX100 استفاده می کند. این ربات یاسکاوا از نظر محموله شبیه به FANUC M710ic/50، ABB IRB 4600/45 و KUKA KR60-2 است. HP50 NX100 می تواند روی زمین، دیوار یا سقف نصب شود. HP50 بالاترین قابلیت تکرار و بزرگترین ابعاد را در کلاس خود ارائه می دهد. یک Motoman HP50 را می توان با یک جوشکار قوس رباتیک یا ابزار دستی سفارشی ادغام کرد تا نیازهای بسیاری از کاربردها را برآورده کند.
- بار: 50 کیلوگرم (110.3 پوند)
- دسترسی: 2046 میلیمتر (80.6 اینچ)
- تکرارپذیری: ± 0.07 میلی متر (.003 اینچ)
- وزن ربات: 500 کیلوگرم (1102 پوند)
- ساختار: بازوی مشترک عمودی

MOTOMAN HP6 -27
Yaskawa Motoman HP6 یک ربات جمع و جور جابجایی مواد است که می تواند برای کاربردهای مختلف مورد استفاده قرار گیرد. ربات صنعتی Motoman HP-6 دارای یک بدنه محکم و فشرده است که به آن امکان می دهد در شرایط سخت کار کند. Motoman HP6 یک ربات شش محوره با موتورهای سروو است این ربات را می توان با یک گیره پنوماتیک یا ابزار دستی سفارشی تجهیز کرد که به آن انعطاف پذیری کامل می دهد. این ربات یاسکاوا از نظر دسترسی و تحمل بار مشابه FANUC-M10ia، ABB IRB 1600 و KUKA KR 10 R1100 است.
- محموله: 6 کیلوگرم (13.23 پوند)
- دسترسی: 1378 میلیمتر (54.258 اینچ)
- تکرارپذیری: ± 0.08 میلی متر (.0031 اینچ)
- وزن ربات: 130 کیلوگرم (286.6 پوند)
- ساختار: عمودی Joint-Arm

MOTOMAN SSF2000 -28
Yaskawa Motoman SSF2000 یک ربات همه کاره با سرعت بالا است که قادر به انجام جوشکاری رباتیک، جابجایی مواد و مونتاژ است. Yaskawa SSF2000 را می توان روی زمین، دیوار یا سقف نصب کرد. SSF 2000 با کنترلر Motoman NX100 در دسترس است. SSF2000 از نظر ماهیت بسیار شبیه به Motoman HP6 است و فقط می تواند با سرعت های بالا کار کند و زمان چرخه را کاهش دهد. بسیاری از رباتهای Motoman NX100 با جوشکار Miller Auto Axcess 450 ادغام شدهاند تا یک ربات آماده برای جوش ارائه کنند.
- بار: 6 کیلوگرم (13.22 پوند)
- دسترسی: 1378 میلیمتر (54.25 اینچ)
- تکرارپذیری: ± 0.08 میلی متر (.0031 اینچ)
- وزن ربات: 130 کیلوگرم (286.6 پوند)
- ساختار: مفصلی

MOTOMAN MH5 -29
Yaskawa Motoman MH5 یک ربات جابجایی مواد روی میز است که دارای ظرفیت باری معادل 5 کیلوگرم است. این ربات از نظر دسترسی و تحمل بار بسیار شبیه به FANUC LR Mate 200ic است. در حالی که MH5 عمدتا یک ربات جابجایی مواد است، توانایی انجام جوشکاری MIG و جوشکاری TIG را دارد. یک Motoman MH5 برای خودکار کردن یک برنامه رباتیک فشرده عالی است.
- بار: 5 کیلوگرم (11 پوند)
- دسترسی: 706 میلیمتر (27.79 اینچ)
- تکرارپذیری: ± 0.02 میلی متر (.0007 اینچ)
- وزن ربات: 27 کیلوگرم (59.52 پوند)
- ساختار: مفصلی

MOTOMAN MH6 -30
Yaskawa Motoman MH6 یک ربات جابجایی مواد است که می تواند برای حذف مواد و برنامه های برش استفاده شودو یک ربات پرسرعت است که می تواند در فضاهای کوچکتر کار کند و در کنترلرهای Motoman DX100 و Yaskawa DX200 موجود است. در حالی که MH6 عمدتا یک ربات جابجایی مواد است، توانایی انجام جوشکاری قوس الکتریکی و جوشکاری لیزری را دارد و همچنین می تواند در یک سلول جوشکاری مانند Arcworld 1000 ادغام شود. این ربات از نظر اندازه، بار و سرعت مشابه FANUC M10ia، ABB 1600 و KUKA KR6 است.
- بار: 6 کیلوگرم (13 پوند)
- برد: 1422 میلیمتر (55.98 اینچ)
- تکرارپذیری: ± 0.08 میلی متر (.0031 اینچ)
- وزن ربات: 130 کیلوگرم (286.6 پوند)
- ساختار: مفصلی

MOTOMAN MH12 -31
Yaskawa Motoman MH12یک ربات همه کاره جابجایی مواد است که می تواند برای برنامه های مونتاژ و برش استفاده شود و یک ربات جمع و جور است که می تواند در فضاهای کوچکتر کار کند. در حالی که MH12 عمدتا یک ربات جابجایی مواد است، توانایی انجام جوشکاری قوس الکتریکی و جوشکاری لیزری را دارد.
- بار: 12 کیلوگرم (26 پوند)
- برد: 1440 میلیمتر (56.69 اینچ)
- تکرارپذیری: ± 0.08 میلی متر (.0031 اینچ)
- وزن ربات: 130 کیلوگرم (286.6 پوند)
- ساختار: مفصلی

MOTOMAN MH24 -32
Yaskawa Motoman MH24 یک ربات همه کاره جابجایی مواد است که می تواند برای برنامه های مونتاژ و برش استفاده شود و نسبت به مدل قبلی خود یعنی Motoman HP20D دارای تحمل بار بیشتری است. Yaskawa MH24 در کنترلرهای Motoman DX200 و Motoman MLX200 موجود است. در حالی که Yaskawa MH-24 عمدتا یک ربات جابجایی مواد است، توانایی انجام جوشکاری قوس الکتریکی و جوشکاری لیزری را دارد.
- بار: 24 کیلوگرم (52 پوند)
- برد: 1730 میلیمتر (68.11 اینچ)
- تکرارپذیری: ± 0.06 میلی متر (.0023 اینچ)
- وزن ربات: 268 کیلوگرم (590 پوند)
- ساختار: مفصلی

MOTOMAN HP20D -33
ربات Yaskawa Motoman HP20D یک ربات صنعتی چند منظوره است که می تواند روی زمین، سقف یا مسیر نصب شود و انعطاف پذیری قابل توجهی به آن می دهد. و می توان از آن برای عملیات جابجایی مواد، چیدن و جاگذاری، مراقبت از ماشین، توزیع، بسته بندی کیس، مرتب سازی یا مونتاژ استفاده کرد.
- محموله: 20 کیلوگرم (44 پوند)
- دسترسی: 1717 میلیمتر (67 اینچ)
- تکرارپذیری: ± 0.06 میلی متر (.0024 اینچ)
- وزن ربات: 268 کیلوگرم (590 پوند)
- ساختار: عمودی Joint-Arm

MOTOMAN MH50 -34
Yaskawa Motoman MH50 یک ربات جابجایی مواد است که در کاربردهای بار متوسط استفاده می شود. و با سرعت بالا کار می کند و در عین حال تحمل بار و برد خوبی را دارد.
- بار: 50 کیلوگرم (110.23 پوند)
- دسترسی: 2061 میلیمتر (81.14 اینچ)
- تکرارپذیری: ± 0.07 میلی متر (.0027 اینچ)
- وزن ربات: 550 کیلوگرم (1212.54 پوند)
- ساختار: مفصلی

MOTOMAN MH80 -35
Yaskawa Motoman MH80 یک ربات صنعتی چند منظوره است که در کاربردهای بار متوسط از جمله مراقبت از ماشین و دستگاه برش استفاده می شودو این ربات کمی کندتر از Motoman MH50 است، اما 30 کیلوگرم بار بیشتر و همان برد دارد.
- بار: 80 کیلوگرم (176.37 پوند)
- دسترسی: 2061 میلیمتر (81.14 اینچ)
- تکرارپذیری: ± 0.07 میلی متر (.0027 اینچ)
- وزن ربات: 555 کیلوگرم (1223.57 پوند)
- ساختار: مفصلی

MOTOMAN MH165 -36
Yaskawa Motoman MH165 یک ربات صنعتی چند منظوره است که در کاربردهای محموله سنگین از جمله مراقبت از ماشین، جوش نقطهای و خللزدایی مورد استفاده قرار میگیرد. Motoman MH165 از نظر محموله بسیار شبیه به FANUC R-2000ib 165F و ABB IRB 6640/1.75 است. در حالی که MH165 عمدتا یک ربات جابجایی مواد است، می تواند برنامه های مونتاژ، توزیع، برش و حذف مواد را نیز انجام دهداستفاده از این ربات یک روش مقرون به صرفه برای خودکار کردن فرآیند جوشکاری نقطه ای است.
- محموله: 165 کیلوگرم (363 پوند)
- دسترسی: 2651 میلیمتر (104.37 اینچ)
- تکرارپذیری: ± 0.2 میلی متر (.007 اینچ)
- وزن ربات: 1100 کیلوگرم (2425 پوند)
- ساختار: مفصلی

deus robot
- حداکثر بسته های مرتب شده در ساعت: 100;
- ظرفیت بلند کردن: 30 کیلوگرم؛
- زمان شارژ کامل: 3 ساعت
- حداکثر زمان کار: 12 ساعت
S Bot 10 راه حلی است که برای مرتب کردن کالاهای تا وزن 30 کیلوگرم در هر کارگاه یا منطقه انبار، بدون توجه به پیکربندی طراحی شده است. استفاده از آن با عملکرد مستقل خود راحت و آسان است.
وزن این ربات 10 کیلوگرم، طول 72 سانتی متر، عرض 52 سانتی متر و ارتفاع 80 سانتی متر است. با تحمل وزن 40 کیلوگرم به سرعت 2 متر بر ثانیه دست می یابد.
مدت زمان شارژ باتری 3 ساعت است و می تواند تا 12 ساعت کار کند. این ربات برای مرتب سازی کالاها مفید است.

ربات برش را هم مطالعه بفرمایید.