


در این مقاله در مورد انواع ربات و کاربردهای آن بهمراه تاریخچه ربات و رباتیک صحبت خواهیم کرد.
فهرست مطالب
رباتیک چیست؟
ربات چیست؟
ریشه کلمه ربات
انواع رباتیک
نرم افزار رباتیک
انواع ربات
اجزای اصلی یک ربات
کاربرد ربات
تاریخچه ربات
رباتیک چیست؟
رباتیک نقطه تلاقی علم، مهندسی و فناوری است که ماشینهایی را تولید میکند که رباتها نامیده میشوند و اعمال انسان را تکرار یا جایگزین میکنند. فرهنگ غرب همیشه شیفته روباتها بودهاست – نمونههای آن شامل R2-D2، ترمیناتور و WALL-E است. این مفاهیم بیش از حد اغراقآمیز و انساننما از روباتها معمولاً کاریکاتور واقعی به نظر میرسند. اما آیا آنها بیشتر از آنچه ما تصور میکنیم آیندهنگر هستند؟ رباتها در حال به دست آوردن قابلیتهای فکری و مکانیکی هستند.

ربات چیست؟
ربات یک ماشین قابل برنامه ریزی است که می تواند یک کار را تکمیل کند، در حالی که اصطلاح رباتیک رشته تحصیلی متمرکز بر توسعه رباتها و اتوماسیون را توصیف میکند. هر ربات دارای سطح متفاوتی از استقلال است. این سطوح از رباتهای کنترلشده توسط انسان که وظایف را انجام میدهند تا رباتهای کاملاً مستقل که وظایف را بدون هیچ گونه تأثیر خارجی انجام میدهند، متغیر است.
همانطور که فناوری پیشرفت میکند، دامنه آنچه که رباتیک در نظر گرفته میشود نیز افزایش مییابد. در سال 2005، 90 درصد از تمام رباتها را میتوان در حال مونتاژ اتومبیل در کارخانههای خودروسازی یافت. این رباتها عمدتاً از بازوهای مکانیکی تشکیل شدهاند که وظیفه جوشکاری یا پیچکردن قسمتهای خاصی از خودرو را دارند.
امروزه، ما شاهد یک تعریف تکامل یافته و توسعه یافته از رباتیک هستیم که شامل توسعه، ایجاد و استفاده از رباتهایی است که وظایفی مانند کاوش در سختترین شرایط سیاره، کمک به اجرای قانون، سادهسازی روشهای جراحی و انجام ماموریتهای نجات را انجام میدهند.
در حالی که دنیای کلی رباتیک در حال گسترش است، یک ربات دارای برخی ویژگی های ثابت است:ربات ها از نوعی ساختار مکانیکی تشکیل شدهاند. جنبه مکانیکی یک ربات به آن کمک میکند تا وظایف خود را در محیطی که برای آن طراحی شده انجام دهد. به عنوان مثال، چرخهای مریخنورد 2020 بهصورت جداگانه موتوری هستند و از لولههای تیتانیومی ساختهشدهاند که به آن کمک میکند تا زمینهای خشن سیاره سرخ را محکم بگیرد.
ویژگی های ربات
ربات ها به قطعات الکتریکی نیاز دارند که ماشین آلات را کنترل و به آنها نیرو میدهند. اساساً، یک جریان الکتریکی – برای مثال یک باتری – برای تامین انرژی اکثر ربات ها مورد نیاز است.
رباتها حداقل دارای سطحی از برنامه نویسی کامپیوتری هستند. بدون مجموعهای از کدها که به او بگوید چه کاری انجام دهد، یک ربات فقط یک قطعه دیگر از ماشین آلات ساده خواهد بود. قرار دادن یک برنامه در یک ربات این توانایی را به آن میدهد که بداند چه زمانی و چگونه یک کار را انجام دهد.
ما بزودی شاهد نوید صنعت رباتیک خواهیم بود، زیرا هوش مصنوعی و نرم افزار نیز به پیشرفت خود ادامه میدهند.
در آینده نزدیک، به لطف پیشرفت در این فناوریها، رباتها همچنان هوشمندتر، انعطافپذیرتر و انرژی کارآمدتر خواهند شد. آنها همچنین به عنوان نقطه کانونی اصلی در کارخانههای هوشمند، جایی که چالشهای سختتری را تحمل میکنند و به امنیت زنجیرههای تامین جهانی کمک میکنند، ادامه خواهند داد.
صنعت رباتیک مملو از یک نوید تحسین برانگیز از پیشرفت است که داستان علمی تخیلی زمانی فقط میتوانست در مورد آن یک رویا باشد. از عمیقترین اعماق اقیانوسهای ما تا هزاران مایل در فضای بیرونی، روباتهایی پیدا میشوند که وظایفی را انجام میدهند که انسانها نمیتوانستند به تنهایی به آنها دست پیدا کنند.
ریشه کلمه ربات
کلمه ربات از کلمه چکی robota گرفتهشدهاست که به معنای “کار اجباری” است. این کلمه برای اولین بار در نمایشنامه R.U.R در سال 1920 ظاهر شد، با اشاره به شخصیتهای نمایشنامه که کارگران تولید انبوه ناتوان از تفکر خلاق بودند.
انواع رباتیک
رباتهای مکانیکی در اشکال و اندازههای مختلف برای انجام کارایی که برای آن طراحی شدهاند، ارائه میشوند. همه ربات ها از نظر طراحی، عملکرد و میزان استقلال متفاوت هستند. از کشتی 0.2 میلی متری “RoboBee” تا کشتی 200 متری حمل و نقل روباتیک “Vindskip“، روبات ها در حال ظهور هستند تا وظایفی را انجام دهند که انسان به سادگی نمی تواند انجام دهد.
پنج نوع متمایز از ربات ها وجود دارد که بسته به توانایی های خود وظایفی را انجام می دهند. در زیر خلاصه ای از این انواع و کارهایی که انجام می دهند آورده شده است.
ربات های از پیش برنامه ریزی شده
ربات های از پیش برنامه ریزی شده در یک محیط کنترلشده کار میکنند که در آن وظایف ساده و یکنواخت انجام میدهند. نمونه ای از یک ربات از پیش برنامه ریزیشده میتواند یک بازوی مکانیکی در خط مونتاژ خودرو باشد. بازو یک وظیفه را انجام میدهد – جوش دادن یک در، وارد کردن قسمت خاصی به موتور و غیره – و وظیفه آن این است که این کار را طولانی تر، سریع تر و کارآمدتر از انسان انجام دهد.
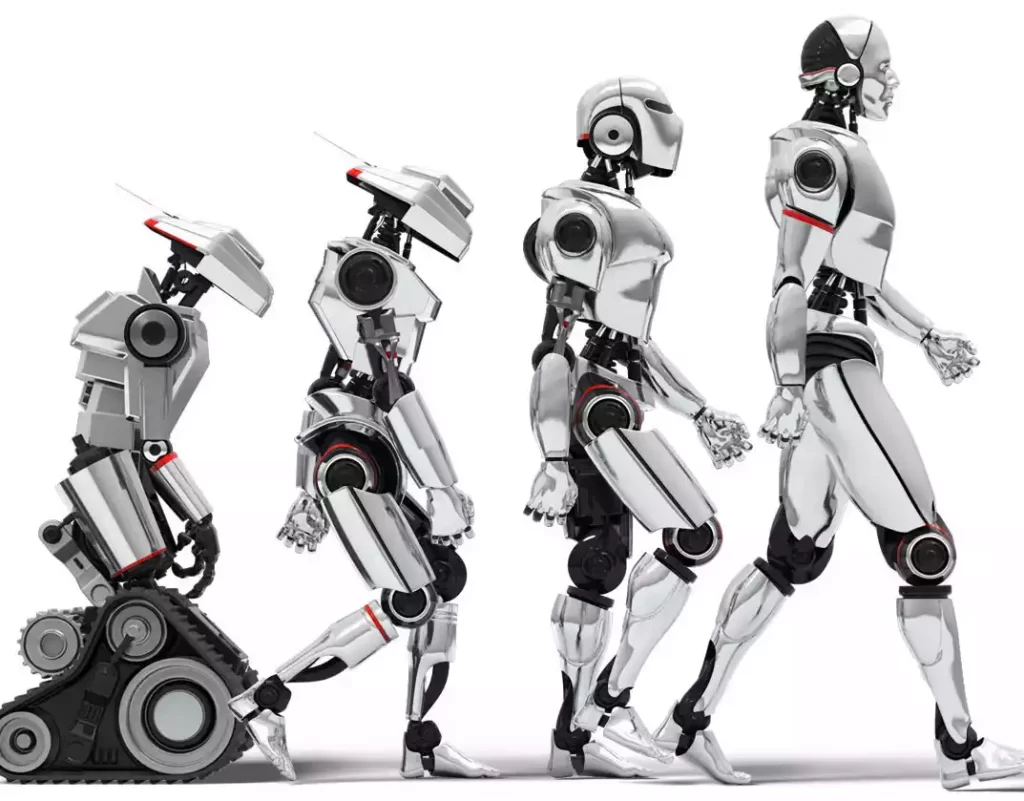
رباتهای انسان نما
ربات های انسان نما ربات هایی هستند که شبیه رفتار انسان هستند یا از آنها تقلید میکنند. این رباتها معمولاً فعالیتهایی شبیه به انسان (مانند دویدن، پریدن و حمل اشیا) انجام میدهند و گاهی به گونهای طراحی میشوند که شبیه ما باشند، حتی چهره و حالات انسانی دارند. دو مورد از برجستهترین نمونههای روباتهای انساننما، سوفیا از Hanson Robotics و اطلس Boston Dynamics هستند.
ربات مستقل
رباتهای مستقل ،مستقل از اپراتورهای انسانی عمل میکنند. این رباتها معمولاً برای انجام کارهایی در محیطهای باز طراحی میشوند که نیازی به نظارت انسان ندارند. آنها کاملاً منحصر به فرد هستند زیرا از حسگرها برای درک جهان اطراف خود استفاده میکنند و سپس از ساختارهای تصمیم گیری (معمولاً یک رایانه) برای برداشتن گام بعدی بهینه بر اساس داده ها و مأموریت خود استفاده میکنند. یکی از نمونههای رباتهای خودران، جاروبرقی Roomba است که از حسگرهایی برای پرسه زدن آزادانه در خانه استفاده میکند.
ربات های از راه دور
ربات های از راه دور، ربات های نیمه مستقلی هستند که از یک شبکه بی سیم برای فعال کردن کنترل انسان از فاصله ایمن استفاده می کنند. این ربات ها معمولا در شرایط جغرافیایی، آب و هوا و شرایط شدید کار می کنند. نمونههایی از رباتهایی که از راه دور کار میکنند، زیردریاییهای کنترلشده توسط انسان هستند که برای رفع نشت لولههای زیر آب در حین نشت نفت BP یا هواپیماهای بدون سرنشین برای شناسایی مینهای زمینی در میدان جنگ استفاده میشوند.
ربات های تقویت کننده
روباتهای تقویتکننده، که به رباتهای واقعیت مجازی نیز معروف هستند، یا تواناییهای فعلی انسان را افزایش میدهند یا قابلیتهایی را که ممکن است انسان از دست داده باشد، جایگزین میکنند. حوزه رباتیک برای تقویت انسان، حوزهای است که در آن داستانهای علمی تخیلی میتواند به زودی به واقعیت تبدیل شود، با رباتهایی که توانایی تعریف مجدد از انسانیت را با سریعتر و قویتر کردن انسانها دارند. برخی از نمونههای روباتهای تقویتکننده فعلی، اندامهای مصنوعی روباتیک یا اسکلتهای بیرونی هستند که برای بلند کردن وزنههای سنگین استفاده میشوند.
نمونه هایی از ربات های خودکار
رباتهای تمیز کننده
رباتهای اصلاح چمن
پهبادهای خودکار
رباتهای دستیار پزشکی
نرم افزار رباتیک
برنامههای رایانهای هستند که وظایف را به طور مستقل انجام میدهند. یکی از موارد استفاده رایج از روباتهای نرمافزاری، ربات چت است. چت بات یک برنامه رایانهای است که مکالمه را هم به صورت آنلاین و هم از طریق تلفن شبیهسازی میکند و اغلب در سناریوهای خدمات مشتری استفاده میشود. چت بات ها میتوانند سرویسهای سادهای باشند که با صورت خودکار به سؤالات پاسخ میدهند یا دستیارهای دیجیتال پیچیدهتری باشند که از اطلاعات کاربر یاد میگیرند.
انواع ربات
رباتهای چت
مکالمات ساده را اغلب در یک محیط خدمات مشتری انجام میدهند.
رباتهای هرزنامه
آدرسهای ایمیل را جمعآوری کرده و نامههای هرزنامه ارسال میکند.
ربات دانلود
نرم افزار و برنامه ها را به صورت خودکار دانلود میکند.
ربات های خزنده موتورهای جستجو
وب سایت ها را اسکن کرده و در موتورهای جستجو قابل مشاهده میباشد.
ربات های مانیتورینگ
گزارش سرعت و وضعیت وب سایت
رباتهای نرمافزاری فقط در اینترنت وجود دارند و از یک کامپیوتر سرچشمه میگیرند، به این معنی که ربات محسوب نمیشوند. برای اینکه یک وسیله به عنوان یک ربات در نظر گرفته شود، باید یک فرم فیزیکی مانند بدنه یا شاسی داشته باشد.
ربات ها چگونه کار میکنند؟
ربات مستقل
روباتهای مستقل میتوانند کاملاً مستقل و مستقل از کنترل اپراتور انسانی کار کنند. اینها معمولاً به برنامهریزی شدیدتری نیاز دارند، اما به رباتها اجازه میدهند تا هنگام انجام کارهای خطرناک، پیش پا افتاده یا غیرممکن، از پخش بمب و سفر در اعماق دریا گرفته تا اتوماسیون کارخانه، جای انسانها را بگیرند. روباتهای مستقل ثابت کردهاند که بیشترین اختلال را برای جامعه ایجاد میکنند، زیرا مشاغل خاصی را حذف میکنند، اما امکانات جدیدی را برای رشد ارائه میدهند.
ربات وابسته
رباتهای وابسته، رباتهای غیرخودمختاری هستند که با انسانها تعامل میکنند تا اقدامات موجودشان را تقویت کرده و تکمیل کنند. این یک شکل نسبتاً جدید از فناوری است و دائماً در حال گسترش به برنامههای کاربردی جدید است، اما یک شکل از روباتهای وابسته که محقق شده است، پروتزهای پیشرفته است که توسط ذهن انسان کنترل میشود.
یک نمونه معروف از یک ربات وابسته توسط جانز هاپکینز APL در سال 2018 برای جانی متنی، بیماری که دستش بالای آرنج قطع شده بود، ایجاد شد. به ماتنی یک اندام مصنوعی مدولار تعبیه شده بود تا محققان بتوانند استفاده از آن را در یک دوره طولانی مطالعه کنند. MPL از طریق الکترومیوگرافی یا سیگنال هایی که از اندام قطع شده او که پروتز را کنترل می کند ارسال می شود، کنترل می شود. با گذشت زمان، Matheny در کنترل MPL کارآمدتر شد و سیگنال های ارسال شده از اندام قطع شده او کوچکتر و کمتر متغیر شد، که منجر به دقت بیشتر در حرکات آن شد و به Matheny اجازه داد کارهای ظریفی مانند نواختن پیانو را انجام دهد.
اجزای اصلی یک ربات چیست؟
رباتها برای ارائه راهحلهایی برای نیازهای مختلف و انجام چندین هدف مختلف ساخته شدهاند و بنابراین، برای تکمیل این وظایف به اجزای تخصصی مختلفی نیاز دارند.
CPU
که وظیفه ربات را در سطح بالا هدایت میکند
محاسبات شامل تمام اجزایی است که واحد پردازش مرکزی یک ربات را تشکیل می دهد که اغلب به عنوان سیستم کنترل آن شناخته می شود. سیستمهای کنترل به گونهای برنامهریزی شدهاند که به ربات میگویند چگونه از اجزای خاص خود استفاده کند، که از جهاتی شبیه به نحوه ارسال سیگنالها توسط مغز انسان به سراسر بدن برای انجام یک کار خاص است. این وظایف رباتیک می تواند شامل هر چیزی از جراحی کم تهاجمی تا بسته بندی خط مونتاژ باشد.
سنسورها
قطعهای که سیگنالهای الکتریکی را برای ربات فراهم میکند تا با جهان تعامل داشتهباشد.
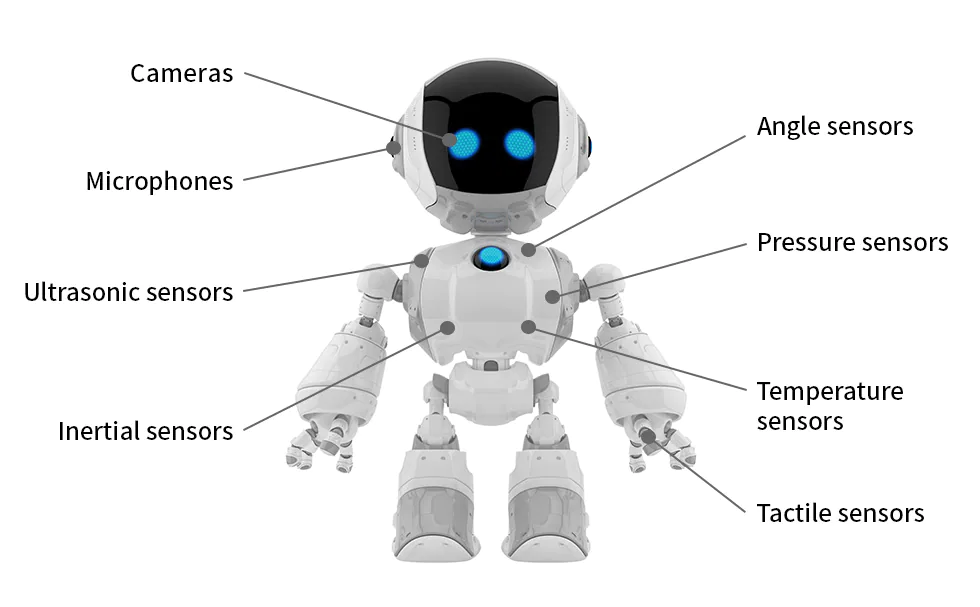
حسگرها محرکهایی را به شکل سیگنالهای الکتریکی در اختیار ربات قرار میدهند که توسط کنترلکننده پردازش میشود و به ربات اجازه میدهد تا با دنیای بیرون تعامل داشتهباشد. حسگرهای معمولی که در رباتها یافت میشوند شامل دوربینهای ویدیویی که به عنوان چشم عمل میکنند، مقاومتهای نوری که به نور واکنش نشان میدهند و میکروفونهایی که مانند گوش عمل میکنند، هستند. این حسگرها به ربات اجازه میدهد تا محیط اطراف خود را بگیرد و منطقی ترین نتیجه را بر اساس لحظه فعلی پردازش کند و به کنترلکننده اجازه میدهد تا دستورات را به اجزای اضافی منتقل کند.
محرک
قطعات موتوری که وظیفه حرکت روبات را بر عهده دارند.

دستگاهی را تنها زمانی میتوان ربات در نظر گرفت که دارای قاب یا بدنه متحرک باشد. عملگرها اجزایی هستند که مسئولیت این حرکت را بر عهده دارند. این قطعات از موتورهایی تشکیل شدهاند که سیگنالها را از سیستم کنترل دریافت میکنند و به صورت پشت سر هم حرکت میکنند تا حرکت لازم برای انجام وظیفه تعیینشده را انجام دهند. عملگرها میتوانند از مواد مختلفی مانند فلز یا الاستیک ساختهشوند و معمولاً با استفاده از هوای فشرده (محرکهای پنوماتیک) یا روغن (محرکهای هیدرولیک) کار میکنند، اما در قالبهای مختلفی برای انجام بهترین وظایف تخصصی خود وجود دارند.
منبع تغذیه
باتری که انرژی ربات را تامین میکند.

همانطور که بدن انسان برای عملکرد به غذا نیاز دارد، روبات ها نیز به قدرت نیاز دارند. رباتهای ثابت، مانند رباتهای موجود در کارخانه، ممکن است با برق متناوب از طریق پریز برق کار کنند، اما معمولاً رباتها از طریق باتری داخلی کار میکنند. بیشتر رباتها از باتریهای اسید سرب برای کیفیت ایمن و ماندگاری طولانی خود استفاده میکنند، در حالی که بقیه ممکن است از نوع فشردهتر اما گرانتر نقره کادمیوم استفاده کنند. ایمنی، وزن، قابلیت تعویض و چرخه عمر فاکتورهای مهمی هستند که در طراحی منبع تغذیه ربات باید در نظر گرفته شوند.
برخی از منابع انرژی بالقوه برای توسعه رباتیک آینده نیز شامل نیروی پنوماتیک از گازهای فشرده، انرژی خورشیدی، نیروی هیدرولیک، زبالههای آلی ذخیره انرژی چرخ طیار از طریق هضم بی هوازی و انرژی هستهای است.
افکتور پایانی
ویژگیهای بیرونی یک ربات که به آن اجازه میدهد یک کار را کامل کند.

افکتورهای پایانی اجزای فیزیکی و معمولاً خارجی هستند که به روباتها اجازه میدهند تا وظایف خود را به پایان برسانند. رباتها در کارخانهها اغلب دارای ابزارهای قابل تعویض مانند رنگپاشها و متهها هستند، رباتهای جراحی ممکن است به چاقوی جراحی مجهز شوند و انواع دیگری از رباتها را میتوان با چنگال یا حتی دست برای کارهایی مانند تحویل، بستهبندی، پخش بمب و موارد دیگر ساخت.
کاربرد ربات
ربات ها دارای موارد استفاده بسیار متنوعی هستند که آنها را به فناوری ایده آل برای آینده تبدیل میکند. به زودی تقریباً در همه جا شاهد روبات ها خواهیم بود. ما آنها را در بیمارستان ها، هتل ها و حتی در جاده ها خواهیم دید.
حفاظت:
مقابله با آتش سوزی جنگل
ساخت:
کار در کارخانهها، یافتن و حمل اقلام در انبارها.
خدمات:
ارائه شرکت به افراد مسن
خانگی:
جاروبرقی و چمن زنی
تحویل:
تکمیل و تحویل غذا
مراقبت های بهداشتی:
کمک به روش های جراحی
نجات:
انجام ماموریتهای جستجو و نجات پس از بلایای طبیعی.
عملیات نظامی:
کشف مینهای زمینی در مناطق جنگی.
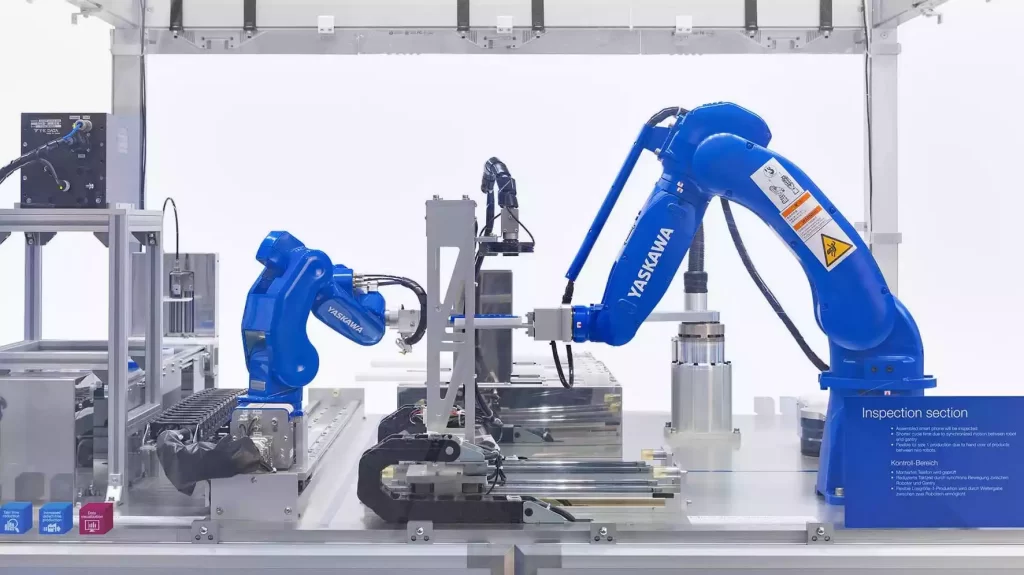
رباتیک در تولید
صنعت تولید احتمالاً قدیمیترین و شناختهشده ترین کاربر رباتها است. این روباتها و رباتهای مشترک (رباتهایی که در کنار انسان کار میکنند) برای آزمایش و مونتاژ مؤثر محصولاتی مانند خودروها و تجهیزات صنعتی کار میکنند. تخمینزده میشود که در حال حاضر بیش از سه میلیون ربات صنعتی در حال استفاده هستند.
ربات های لجستیک
رباتهای حمل و نقل، جابجایی و کنترل کیفیت برای اکثر خردهفروشان و شرکتهای لجستیک به یک ابزار ضروری تبدیل شدهاند. از آنجایی که اکنون انتظار داریم بستههای ما با سرعتی فوقالعاده برسد، شرکتهای لجستیک از روباتها در انبارها و حتی در جادهها استفاده میکنند تا به حداکثر بهرهوری زمان کمک کنند. در حال حاضر، روباتهایی وجود دارند که اقلام شما را از قفسهها بیرون میآورند، آنها را در کف انبار حمل میکنند و بستهبندی میکنند. علاوه بر این، افزایش تعداد رباتهای پستچی (رباتهایی که بسته شما را بهطور مستقل به درب منزل شما تحویل میدهند) تضمین میکند که در آینده نزدیک با یک ربات لجستیکی رو در رو خواهید شد.

ربات برای خانه
این دیگر علمی تخیلی نیست. رباتها در سرتاسر خانههای ما دیده میشوند، به ما کمک میکنند، برنامههای ما را یادآوری میکنند و حتی بچههایمان را سرگرم میکنند. شناختهشده ترین نمونه ربات های خانگی جاروبرقی مستقل Roomba است. علاوه بر این، روباتها اکنون تکامل یافتهاند تا همه چیز را از چمنزدن خودکار تا تمیز کردن استخرها انجام دهند.

رباتهای مسافرتی
آیا چیزی بیشتر از وسایل نقلیه خودران علمی تخیلی وجود دارد؟ این خودروهای خودران دیگر فقط تخیل نیستند. ترکیبی از علم داده و رباتیک، وسایل نقلیه خودران در حال طوفان جهان هستند. شرکتهایی مانند تسلا، فورد، وایمو، فولکس واگن و بیامو همگی روی موج بعدی سفر کار میکنند که به ما اجازه میدهد راحت بنشینیم، استراحت کنیم و از سواری لذت ببریم. شرکتهای Uber و Lyft همچنین در حال توسعه وسایل نقلیه اشتراکی مستقل هستند که نیازی به استفاده از وسیله نقلیه توسط انسان ندارند.

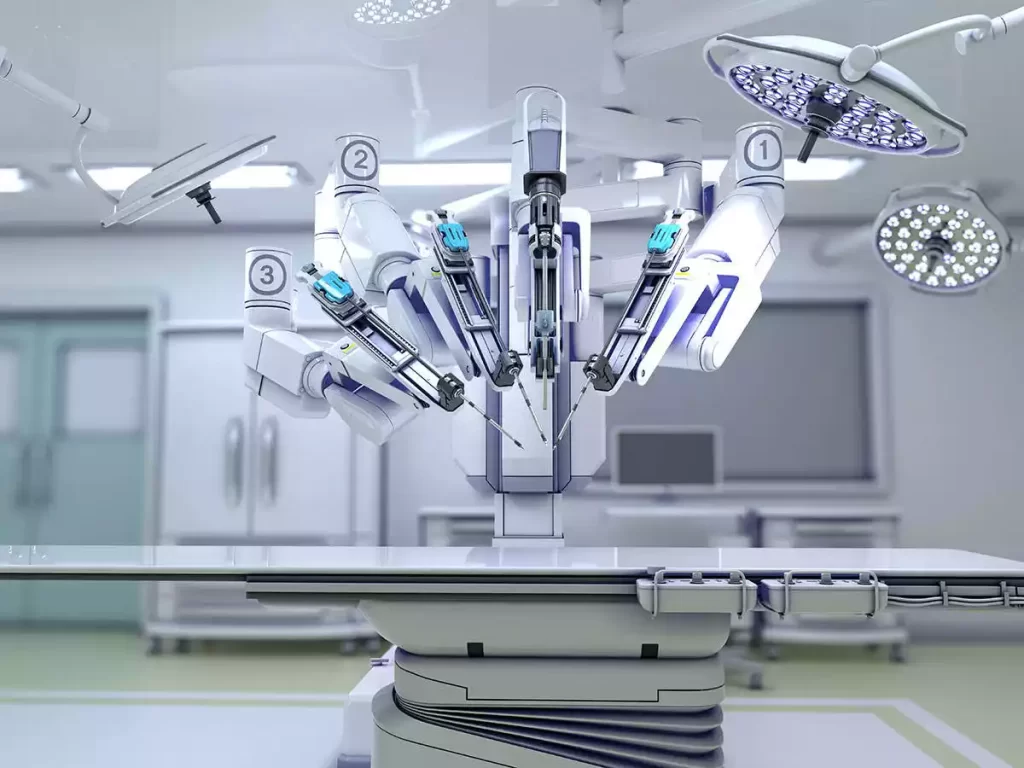
رباتیک مراقبت های بهداشتی
رباتها در صنعت مراقبتهای بهداشتی پیشرفتهای چشمگیری داشتهاند. این شگفتیهای مکانیکی تقریباً در همه جنبههای مراقبتهای بهداشتی، از جراحیهای با کمک ربات گرفته تا رباتهایی که به انسانها در بهبود آسیبهای فیزیوتراپی کمک میکنند، استفاده میشوند. نمونههایی از روباتهایی که در بخش مراقبتهای بهداشتی کار میکنند، دستیاران مراقبتهای بهداشتی تویوتا هستند که به مردم کمک میکنند توانایی راه رفتن را دوباره به دست آورند، و TUG، رباتی که برای قدم زدن مستقل در بیمارستان و ارائه همه چیز از دارو گرفته تا ملحفههای تمیز طراحی شدهاست.
ربات ها توسط شرکتهای داروسازی برای کمک به مبارزه با COVID-19 به کار گرفتهشدهاند. این رباتها اکنون برای پر کردن و مهر و موم کردن جوابهای آزمایش COVID-19 استفاده میشوند و همچنین توسط برخی تولیدکنندگان برای تولید PPE و ماسکهای تنفسی استفاده میشوند.
تاریخچه ربات
مردم از زمانی که تمدنهای باستانی اسطورهها و باورهای “ماشینهای فکر” را در جوامع خود گنجانده و ساعت آب را اختراع کردند، به فکر ربات ها بودهاند. رباتیک از زمان یونانیان، رومیها و مصریان به شدت تغییر کردهاست، اما تاریخچه آن بسیار گسترده است. در اینجا نگاهی به برخی از مهمترین رویدادهایی که تاریخ رباتیک را شکل دادند، میاندازیم.
1700
(1737) Jacques de Vaucanson اولین پلیر بیومکانیکی ثبت شده را ساخت. این دستگاه مکانیکی که فلوت پلیر نام دارد، 12 آهنگ را پخش میکند.
دهه 1920
(1920) کلمه “ربات” اولین بار در نمایشنامه کارل کاپک R.U.R ظاهر شد. ربات از کلمه چکی “robota” گرفتهشدهاست که به معنای “کار اجباری” است.(1926) اولین ربات فیلم در متروپلیس ظاهر شد.
دهه 1930
(1936) آلن تورینگ “درباره اعداد قابل محاسبه” را منتشر می کند، مقاله ای که مفهوم یک کامپیوتر نظری به نام ماشین تورینگ را معرفی می کند.
دهه 1940
(1948) Cybernetics or Control and Communication in the Animal توسط استاد MIT نوربرت وینر منتشر شده است. این کتاب در مورد مفهوم ارتباطات و کنترل در سیستم های الکترونیکی، مکانیکی و بیولوژیکی صحبت می کند.
(1949) ویلیام گری والتر، فیزیولوژیست عصبی و مخترع، المر و السی را معرفی می کند، یک جفت ربات با باتری که شبیه لاک پشت هستند.
دهه 1950
(1950) آیزاک آسیموف سه قانون رباتیک را منتشر می کند.
(1950) آلن تورینگ مقاله «ماشینهای محاسباتی و هوش» را منتشر میکند و چیزی را پیشنهاد میکند که اکنون به عنوان آزمون تورینگ شناخته میشود،
روشی برای تعیین هوشمند بودن یک ماشین
دهه 1960
(1961) اولین بازوی رباتیک در تاسیسات جنرال موتورز کار میکند. بازو قطعات فلزی را بلندکرده و روی همچیده و تقریباً 200 حرکت را دنبال میکند.
(1969) ویکتور شاینمن بازوی استنفورد را اختراع کرد، بازوی روباتیک با شش مفصل که میتواند حرکات بازوی انسان را تقلید کند. این یکی از اولین روبات هاییاست که برای کنترل توسط کامپیوتر طراحی شدهاست.
دهه 1970
(1972) گروهی از مهندسان در مؤسسه تحقیقاتی استنفورد، Shakey را ایجاد کردند، اولین رباتی که از هوش مصنوعی استفاده کرد. Shakey وظایف خود را با مشاهده محیط خود و تشکیل یک طرح کامل میکند.
(1978) هیروشی ماکینو، محقق اتوماسیون، یک بازوی روباتیک چهار محوره SCARA را طراحی میکند. این بازو که به عنوان اولین ربات “انتخاب و قرار دادن” شناختهمیشود،
دهه 1980
(1985) اولین استفاده مستند از روش جراحی با کمک ربات از بازوی جراحی رباتیک PUMA 560 استفاده می کند.
(1985) ویلیام ویتاکر دو ربات با کنترل از راه دور می سازد که به نیروگاه هسته ای جزیره تری مایل فرستاده می شوند. رباتها در زیرزمین ساختمان راکتور آسیبدیده کار میکنند تا مکان را بررسی کنند، اطلاعات را ارسال کنند و نمونههای هسته را برای اندازهگیری سطوح تشعشع حفاری کنند.
دهه 1990
(1990) گروهی از محققان MIT iRobot را پیدا کردند، شرکتی که پشت جاروبرقی Roomba قرار داشت.
(1992) مارک رایبرت، یکی دیگر از محققان MIT، شرکت رباتیک Boston Dynamics را تأسیس کرد.
(1997) Sojourner روی مریخ فرود می آید. این مریخ نورد با برد آزاد 2.3 میلیارد بیت داده شامل بیش از 17000 تصویر، 15 تجزیه و تحلیل شیمیایی سنگ ها و خاک و داده های گسترده در مورد آب و هوای مریخ را به زمین ارسال می کند.
(1998) Furby، یک اسباببازی حیوان خانگی روباتیک که توسط Tiger Electronics ساخته شده است، عرضه شد و در نهایت دهها میلیون واحد به فروش رسید. Furbys از پیش برنامه ریزی شده اند تا به مرور زمان به زبان بیهوده صحبت کنند و زبان های دیگر را یاد بگیرند.
(1999) Aibo، یک توله سگ رباتیک با نیروی هوش مصنوعی وارد بازار تجاری شد. این سگ رباتیک که توسط سونی ساخته شده است، به صداها واکنش نشان می دهد و رفتارهای از پیش برنامه ریزی شده ای دارد.
سال 2000
سونی از ربات انسان نمای خود بعنوان یک ربات سرگرمی انسان نما دوپا رو نمایی میکند.
سال 2001
iRobot’s PackBot سایت مرکز تجارت جهانی را پس از 11 سپتامبر جستجو میکند.
سال 2002
iRobot Roomba را ایجاد می کند. ربات خلاء اولین رباتی است که در بخش تجاری در بین عموم محبوب شد.
سال 2003
Mick Mountz و بنیانگذاران Amazon Robotics (که قبلاً Kiva Systems بود) ربات Kiva را اختراع کردند. ربات در اطراف انبارها مانور می دهد و کالاها را جابجا می کند.
سال 2004
Boston Dynamics از BigDog روباتی چهارپا که توسط انسان کنترل میشود رونمایی کرد. این ربات به دلیل چابک تر بودن نسبت بهرباتهای قبلی شناختهشدهاست، زیرا قادر است هر بار تنها دو پا روی زمین داشتهباشد.
سال 2004
آژانس پروژههای تحقیقاتی پیشرفته دفاعی وزارت دفاع چالش بزرگ دارپا را ایجاد میکند. یک مسابقه اتومبیلرانی خودران که هدف آن الهام بخشیدن به نوآوری در فناوری خودروهای خودمختار نظامی است.
سال 2005
فولکس واگن توارگ به نام استنلی برنده دومین چالش بزرگ دارپا شد. این خودرو از هوش مصنوعی آموزشدیده بر روی عادات رانندگی انسانهای واقعی و پنج حسگر لیزری لیدار برای تکمیل یک دوره 131.2 مایلی در صحرای موهاوی استفاده میکند.
سال 2011
ناسا و جنرال موتورز برای ارسال Robonaut 2، یک دستیار رباتیک انسانی، با شاتل فضایی دیسکاوری به فضا همکاری میکنند. این ربات ساکن دائمی ایستگاه فضایی بین المللی میشود.
سال 2012
اولین مجوز برای یک خودروی خودران در نوادا صادر شد. این خودرو یک تویوتا پریوس است که با فناوری توسعه یافته توسط گوگل اصلاح شدهاست.
سال 2013
Boston Dynamics، اطلس، یک ربات انسان نما دوپا را منتشر کرد که از 28 مفصل هیدرولیک برای تقلید حرکات انسان استفاده می کند – از جمله انجام یک چرخش به عقب.
سال 2014
محققان کانادایی hitchBOT را توسعه میدهند، رباتی که به عنوان بخشی از یک آزمایش اجتماعی در سراسر کانادا و اروپا حرکت میکند.
سال 2016
سوفیا، یک ربات انسان نما به نام اولین شهروند ربات، توسط Hanson Robotics ساختهشدهاست. این ربات توانایی تشخیص چهره، ارتباط کلامی و بیان چهره را دارد.
سال 2020
- از ربات ها برای توزیع آزمایشات و واکسیناسیون کووید-19 استفاده می شود.
- 384000 ربات صنعتی در سراسر جهان برای انجام کارهای مختلف تولیدی و انبار ارسال می شود.
سال 2021
کروز، یک شرکت خودروی خودمختار، اولین دو سواری آزمایشی روباتاکسی خود را در سانفرانسیسکو انجام میدهد.